As we saw in our article, Continuum Robots and Tactile Sensors, the medical industry is making great strides with the help of robotics. In that post, we introduced the idea of tactile sensors. We also presented how machine learning algorithms allow these sensors to gather shape, weight stiffness and friction coefficient data. This in turn allows the sensor-equipped robots to respond appropriately to the objects they handle.
Developing the surface materials for these tactile sensors is a science in itself. This is where the research of Lieutenant Colonel Brodie Hoyer, PhD, comes into play. While at the Advanced Medical Technologies Laboratory and working with the Nonlinear Mechanics Lab at the University of Colorado, he and his advisors created a device to test the adhesive contact properties of materials intended for, among other things, medical robotics.
Project Technical Profile
- Client / Partner: Advanced Medical Robotics Research Team (Lead Researcher: Dr. Brodie Hoyer)
- Application Category: Soft-Tribology, Biomaterial Characterization, & Medical Robotics
- The Material Challenge: Modeling and predicting the complex friction, wear, and adhesion that occurs during dynamic rolling contact between textured rigid surfaces and soft, tissue-like biological membranes (PDMS silicone substrates).
- The Measurement Challenge: Isolating and measuring minute tangential and normal force vectors across three degrees of freedom (indentation, translation, and rotation) while navigating standard contact model limits (\(Hertz\) and \(JKR\) models) that fail when membrane thickness matches the contact half-width.
- Hardware Enabler: Multi-sensor load cell arrays, frictionless air bearings, and the Tacuna Systems EMBSGB200 Load Cell Amplifier.
- Research Outcomes: New models to predict adhesion behaviors in soft materials, laying the groundwork for further research in contact mechanics of medical robotics materials. These models account for the effects of viscoelasticity and material thickness on the contact properties of soft membranes.
The Challenge: Soft-Tribology with Thin Membranes
The field of study for understanding the contact dynamics of two surfaces is known as tribology. Tribology studies with soft, tissue-like materials are more specifically categorized as soft-tribology. Dr. Hoyer’s research involved creating such a soft-tribometric device.
The Tribology Problem:
New models are necessary to predict the contact properties of thin membranes
Thin membranes are outside the scope of traditional tribology predictive models
A new device is needed to test these properties
Specifically, Dr. Hoyer wanted to improve the ability to study rolling contact mechanics between textured surfaces and soft tissue-like materials such as those found in the body. This would allow scientists to model and predict the friction, wear, and adhesion between the two materials. This in turn could contribute to the design of a range of products including medical robotics, bandage adhesives, and wearable medical devices.
The first challenge was to create a mathematical model to predict the tested material’s behavior. Older models for contact between surfaces addressed in Dr. Hoyer’s research apply mostly to more rigid materials. That is, they don’t account for the stretching or adhesion of soft membranes. These thin membranes are often used as contact surfaces in tactile sensors.
Also, these previous models (first Hertz, then Johnson, Kendall and Roberts) describe simple indentation contact and not rolling contact. Dr. Hoyer’s research hypothesized that using a roller to apply force and make contact across a soft material would give the ability to both control and account for the soft material’s stretching. This would be the case even if the material stretches or otherwise behaves differently when frictional forces act upon it along different directions.
Theoretical Limitations: Traditional Adhesion Models vs. Rolling Contact
The Baseline: Traditional Static Indentation Models
First, Dr. Hoyer used these previous models of forces and deformation in contact theory to describe the behavior of a rolling indenter over a flat polydimethylsiloxane (PDMS) substrate. PDMS is a type of silicone with certain physical properties that are similar to biological tissue. It is also optically clear, making it possible to photograph the contact between it and the indenter. (If you’ve seen soft contact lenses, you’ve probably seen PDMS!)
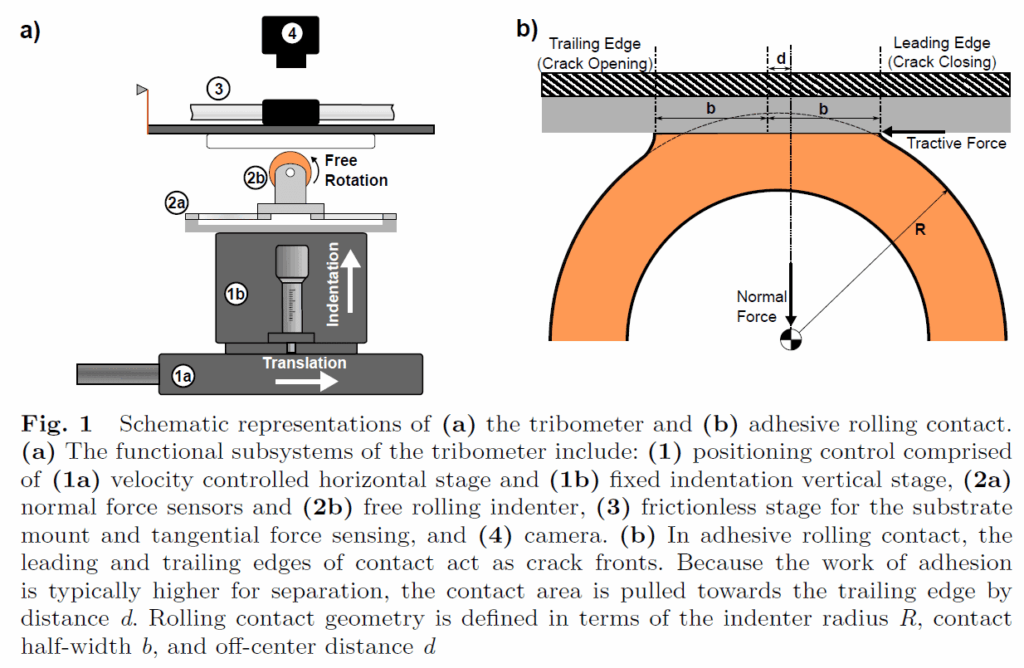
He started with these earlier models, describing the contact behavior of a static cylinder indenter. These models define “crack fronts” as the interfaces where the two contact materials adhere or separate. They assume the crack fronts are equidistant from the center axis of the cylinder. (See Figure 1(b) below, from the original research paper.) These models also assume the cylinder’s adhesion to the substrate materials was the same along both crack fronts. That is, opening (indenter lifting) and closing (indenter compressing) require equal work.
Hoyer’s Model: Asymmetric Adhesion in Dynamic Rolling Contact
By contrast, Dr. Hoyer’s model needed to account for the behavior of a soft material of finite thickness rolling over the substrate. In this case, the roller’s leading edge has a different work of adhesion along the leading (closing) edge or crack front than on the trailing (opening) edge. Therefore, these crack fronts are no longer equidistant from the center axis of the roller. Instead, because of the higher work of adhesion at the roller’s trailing edge, the leading-edge crack front is a shorter distance from the roller’s center axis. Hoyer’s laboratory setup was designed to verify and quantify this behavior.
By starting with traditional adhesion models, assuming a cylindrical indenter and taking into account the different behavior of a rolling indenter and soft materials, Hoyer derived the relationship between the tractive force (traction) between the two surfaces (the one on the roller and the one on the flat surface) to be the difference between the work of separation at the trailing edge of the roller and the work of adhesion at its leading edge. The specifics can be found in his research paper, at this link.
Adhesion Data Collection: Engineering the Three-Axis Rolling Indenter
Mechanical Indenter Design Considerations
The contact indenter design for this experiment had three directions of movement, or three degrees of freedom. (See Figure 1 (a) above.) The first direction was vertical displacement. This action would compress the indenter toward, or release it from, the flat substrate material (labeled “Indentation” in Figure 1(a)). The second was a horizontal movement that would push the base of the roller forward (“Translation” in Figure 1(a)). The third motion was the rolling action itself. To isolate forces in each direction, the flat surface mount included frictionless air bearings. This prevented the transfer of normal loads to the load cells measuring tangential forces. It also eliminated friction that could alter tractive force measurements.
Data Acquisition and Signal Conditioning
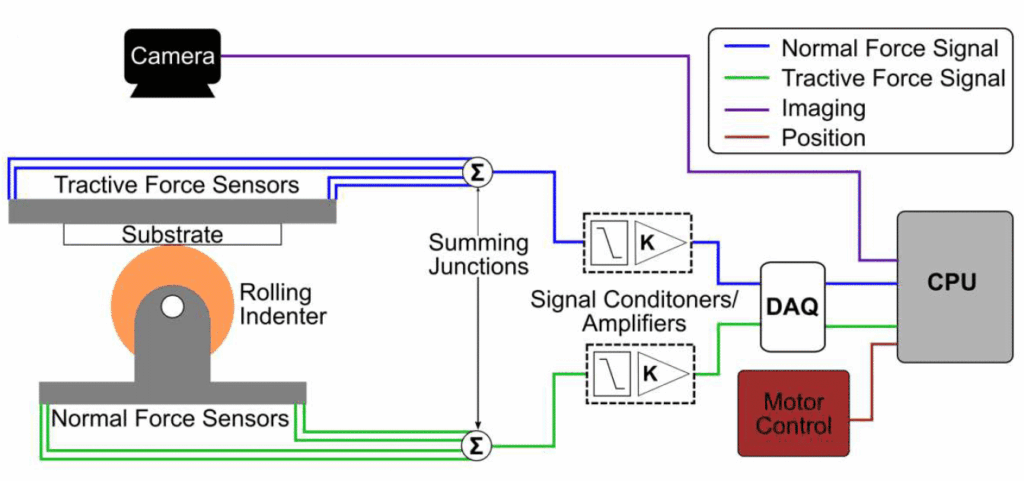
Multiple load cells captured both tangential and normal forces at various positions in the structure. Dr. Hoyer also mounted a camera above the contact surfaces to visually capture the leading and trailing contact edges. This allowed him to confirm his theories of the contact width and difference of these two edges’ distance from the roller’s center axis. Knowing the roller’s exact vertical and horizontal position when measuring these widths was essential. Therefore, each image had a timestamp to match the roller’s exact position with each visual measurement.
For each force direction, a junction box electrically combined load cell measurements. Signals from each junction box passed through a Tacuna Systems EMBSGB200 amplifier to a data acquisition system and collected by a MATLAB script. This is pictured in Figure 2.
The Experiment: Verifying the Device, Then Testing Soft Membranes
Hoyer’s experiment involved two test cases. The first case tested the device’s behavior against previous models (Johnson, Kendall, and Roberts) to prove it would behave as expected. This test case therefore, used a rigid acrylic indenter rolling along a flat, relatively rigid elastomer substrate.
The second test case studied the roller’s adhesion when covered with a soft membrane. This test case used the same flat substrate as the first. However, instead of the rigid indenter, this case used one with a rigid core thermally bonded to a cover of a 3mm highly deformable viscoelastic elastomer. This setup would give insight not only to the contact behavior from the material’s viscoelasticity, but also from its thickness.
Results: The Data Proves the Model
The baseline test case successfully validated the new tribometric device by generating outputs that closely mirrored established predictive models. It also proved the system’s mechanical framework was sound. The results of this test case are found here.
In the second test case, the data validated the new predictive models in thin flexible membranes that the previous mathematical models could not. It proved that as the contact half-width approached the membrane’s thickness, legacy predictive models deviated sharply from the material’s actual behavior. That is, a much greater normal force was needed to create the same contact half-width than older models would predict. In contrast, Brody’s new predictive model did agree very closely with the experimental data.
This second test case also showed that the roller’s translational velocity affected the contact half width relative to the applied normal force. That is, the faster the roller moved over the substrate, the larger the contact half width became, even if the roller was operating with the same depth of indent.
These first two findings of the second test case indicate that when testing a membrane’s contact properties relative to normal forces, the experimenter needs to take into account the membrane’s viscoelasticity AND its thickness. Yet this was not the case with the tractive forces. Interestingly, the material’s viscoelastic properties did not significantly affect its traction. Tractive force behaved consistently as a function of tangential velocity regardless of how deeply the indenter pressed on the substrate. Therefore, Dr. Hoyer concluded that this measurement could reliably predict the adhesion between a membrane and the PDMS substrate.
What’s Next?
This study establishes a solid foundation for future thin-membrane contact mechanics research. We at Tacuna Systems are proud to have supported this research with the amplification required for its data collection. Championing academic research and educational innovation is a cornerstone of our mission. If your team is navigating a unique force measurement challenge, contact our engineering team to see how we can help.